CAD
GrabCAD
Check out my GrabCAD profile for a variety of CAD models I have created.
Google Coral
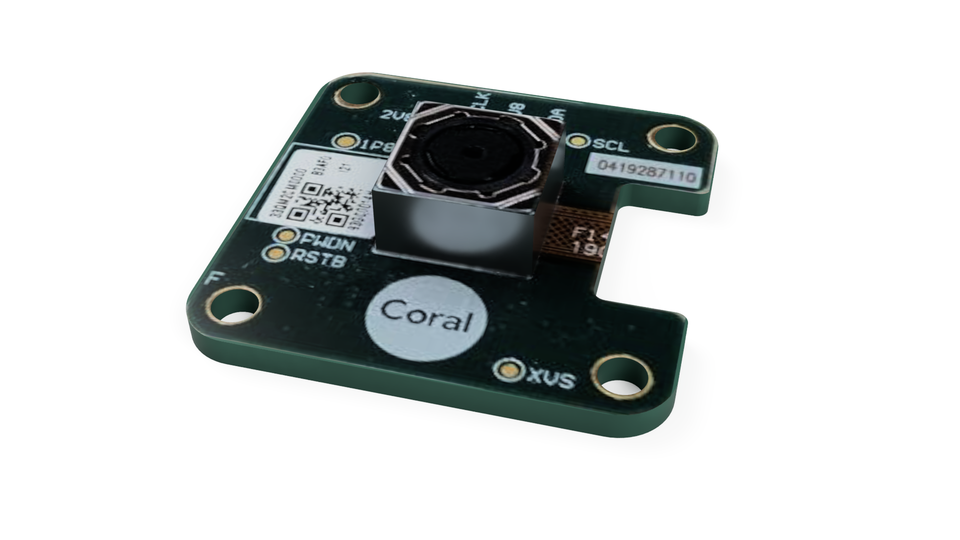
Google Coral Camera
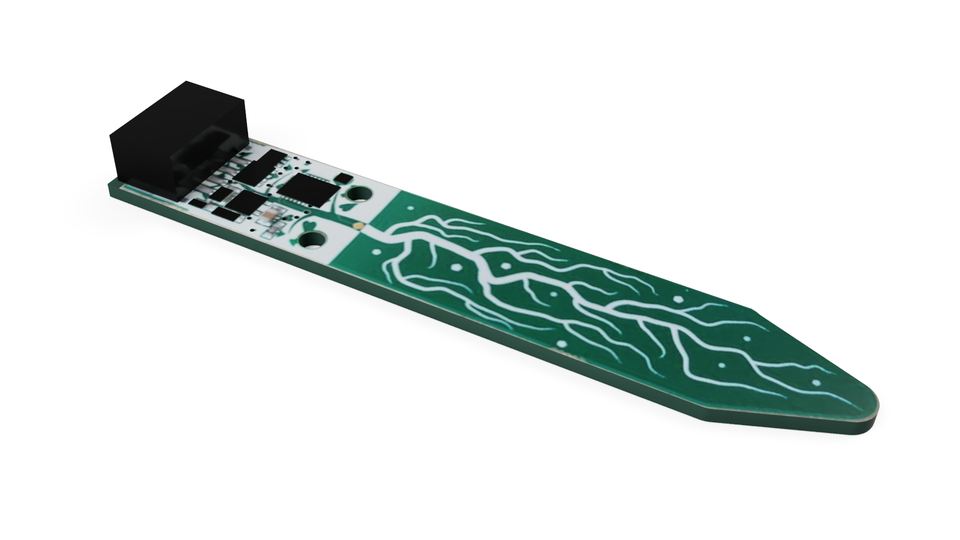
STEMMA Soil Moisture Sensor

Tarot 680 Drone Frame

DJI F550 Drone Frame

Chameleon3 Camera
VEX Online Design Challenges
The VEX Belt Drive Kit
This is my 1st place entry in the 2016 Make It Real CAD Engineering Challenge.
Introduction
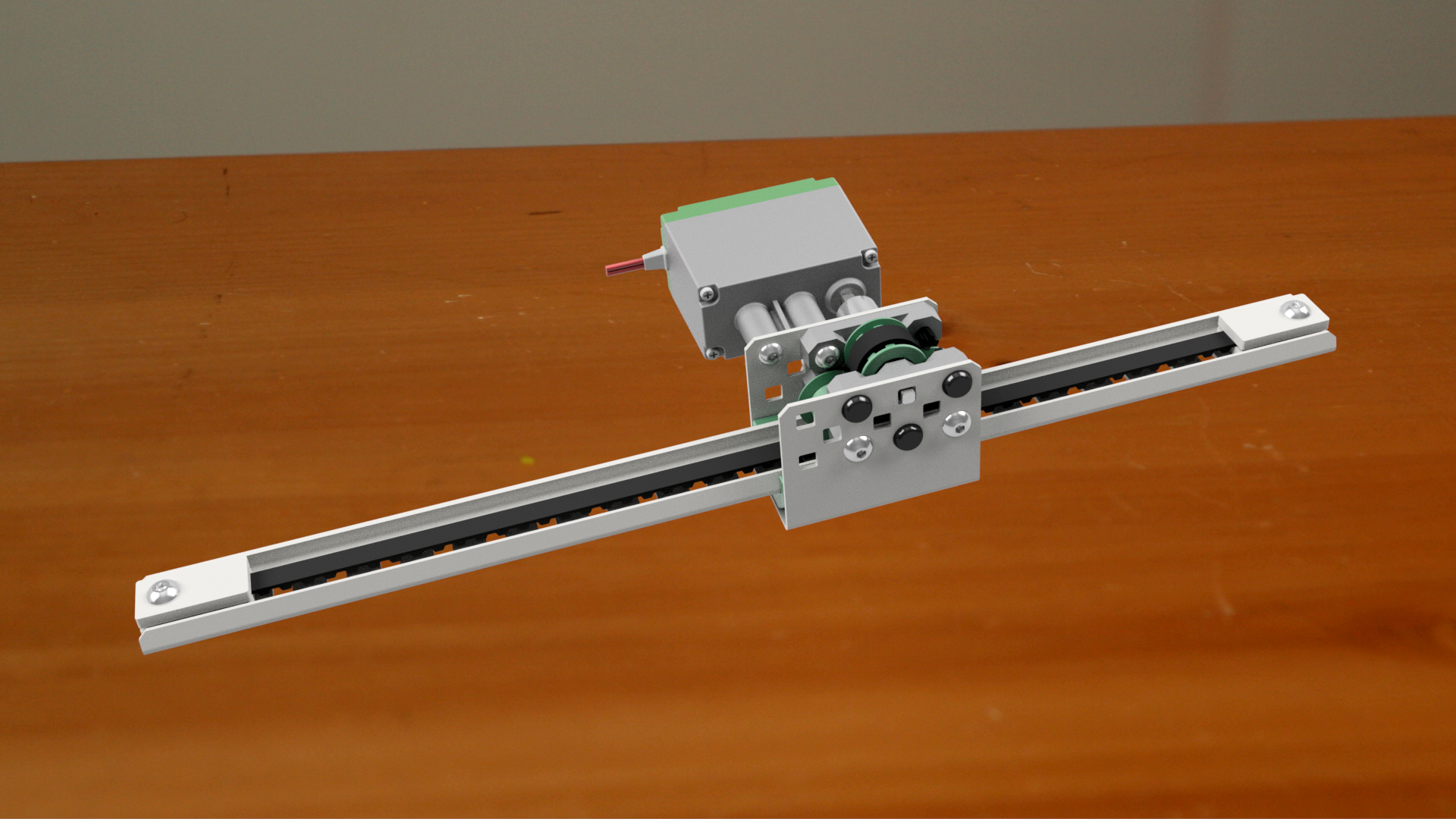
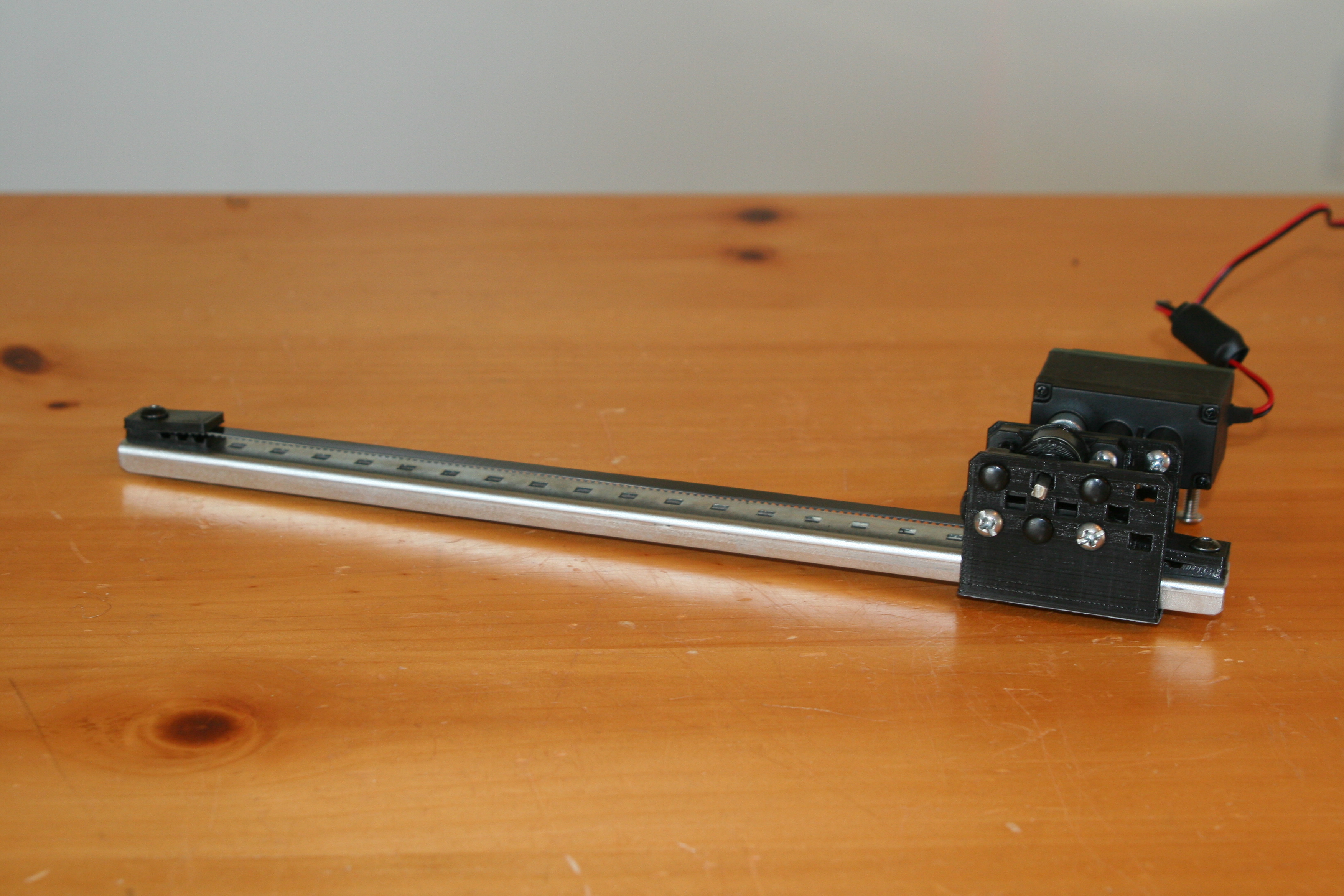
The VEX Belt Drive Kit was designed as a compact way to provide precise linear motion with minimal backlash. It allows a linear slide kit or linear motion kit to be driven using a standard XL belt. The belt can fit inside the linear slide when a low-profile solution is needed. The kit is designed to work with standard and steel-core XL belt up to 9mm wide, allowing users to select the belt strength most suitable for their application.
How the Part Would be Used
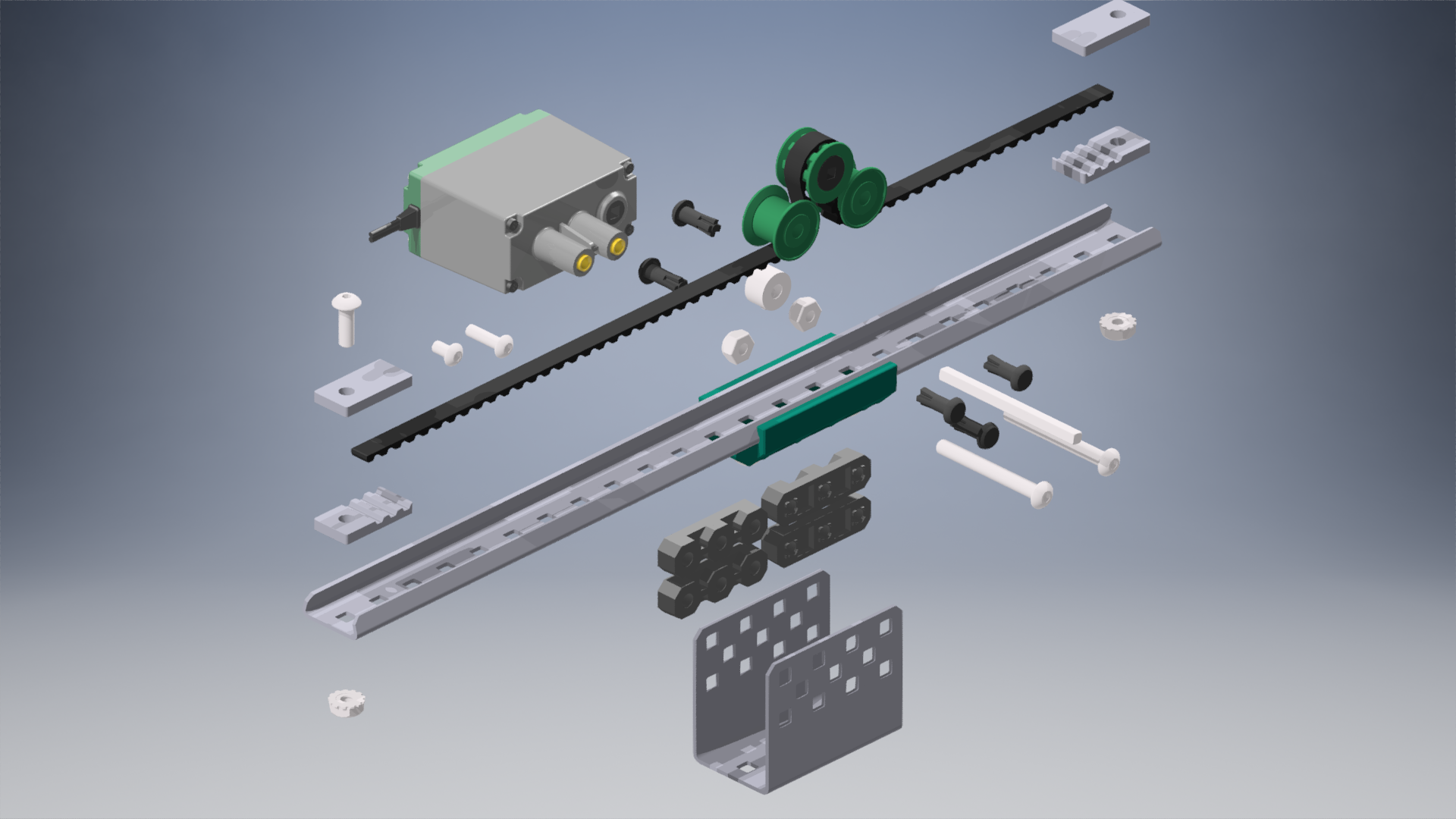
The kit includes a belt drive bracket, an 8-tooth drive pulley, two idler pulleys, two belt clamps, and 6 feet of belt stock as well as the necessary hardware. The belt drive bracket is used to mount two idler pulleys, a drive pulley, and a motor to a slide truck. The two idler pulleys and drive pulley are mounted in triangular configuration to maximize contact between the belt and the drive pulley (see image 4). The belt clamps are then used to connect the ends of the belt to the ends of the slide. The belt stock can be cut to the desired length depending on the application or length of slide. Once assembled, either the slide or the truck can be secured to a fixed point on the robot’s frame. The other component can then be secured to the part being actuated.
This kit could be used for any application requiring linear motion. Some examples include linear lifts, climbing/elevation mechanisms (see image 7), outriggers, etc.
Design Process
I started by gathering ideas from several teams on what products they felt would have helped them most when building robots for the VEX Robotics Competition. We arrived at the idea of a belt drive kit due to my team’s need of a compact, linear lift in several past competitions, as well as another team’s need for a low-backlash gantry system for a non-competition VEX project. As I developed the design for the belt drive kit, I took into account how it would fit in with the VEX Robotics Design System. The kit is designed to be compatible with high strength shafts and gear inserts, fit the standard vex hole pattern, and work with both styles of linear slide. Once the design was complete, a 3D printed prototype was created to demonstrate the kit’s operation and feasibility.
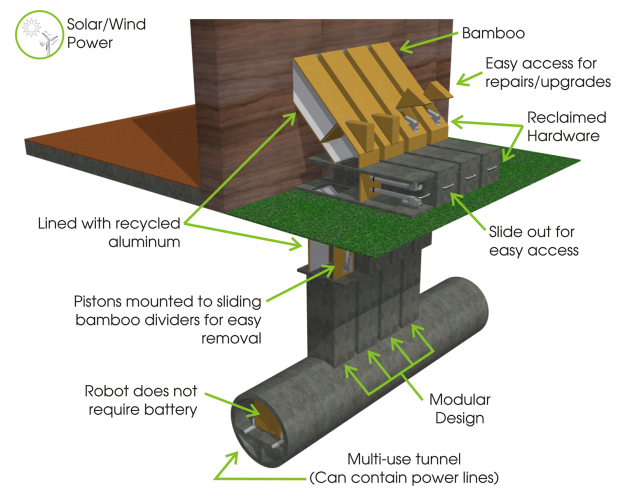
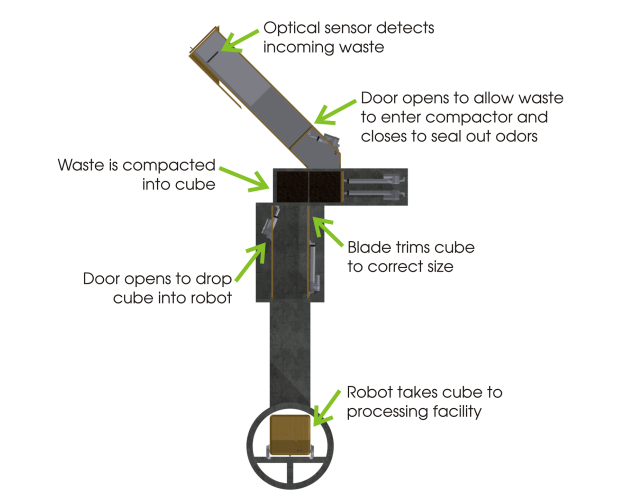
R-WARS
This is my 3rd place winning entry for the 2014 Autodesk Sustainable Design Challenge.
Much of the waste thrown in the trash today is usable through recycling or as compost. Instead, it is filling up our landfills. Sorting of usable waste from trash is often inconvenient, and current methods for transporting waste rely primarily on large, inefficient trucks using fossil fuels. The R-WARS (Robotic Waste Recycling System) is a solution to these problems.

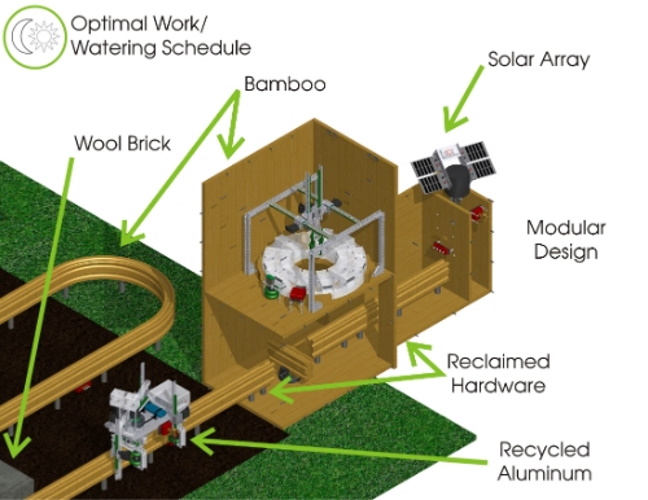
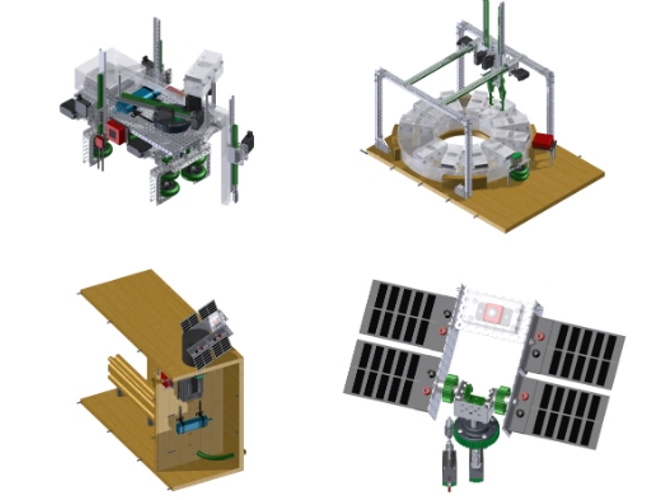
R-CROP
This is my 1st place winning entry for the 2013 Autodesk Sustainable Design Challenge.
Home gardening is an important aspect of sustainability. By growing your own food, you help eliminate the cost and energy usage involved in growing, packaging, and shipping food. However, not everybody has the time to tend a garden daily, and automatic devices, such as watering systems, are often inefficient and unable to adjust to changes in the environment. The R-CROP (Robotics Contributing to Renewable Organic Planting) was created to help you maintain a successful and efficient garden almost effortlessly.