Research
IDEAlab
VoxelFuse
This project seeks to provide methods and set of tools for processing, modifying, and generating 3D models that use multiple materials and fabrication processes. Areas of research include planning of fabrication steps, automatic part modification, optimization of component properties, and generation of the files and fixtures needed to produce multi-material parts. Implementation of these algorithms is done in Python using a voxel-based model representation. This work will make multi-material fabrication more accessible for educational and research robotics.
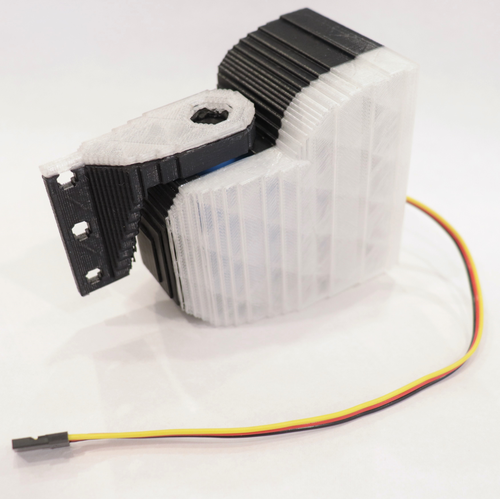
The example model pictured shows a 3D printed robot joint with an embedded servo motor. To create this part, a simple model was first created that represented the desired shape and position of the robot body and motor. VoxelFuse was then used to process the input model to generate clearances around the motor and export the modified model for slicing. After slicing the model and generating printer g-code, VoxelFuse was used to determine the layer at which the print needed to be paused to insert the motor, and then to modify the g-code accordingly. While printing, two colors of plastic were used to illustrate where this insertion step occured.
More information and source code is available in the project's GitHub repository. For more information on the underlying framework and example applications, see the papers on my Google Scholar Profile.
DREAMS Lab
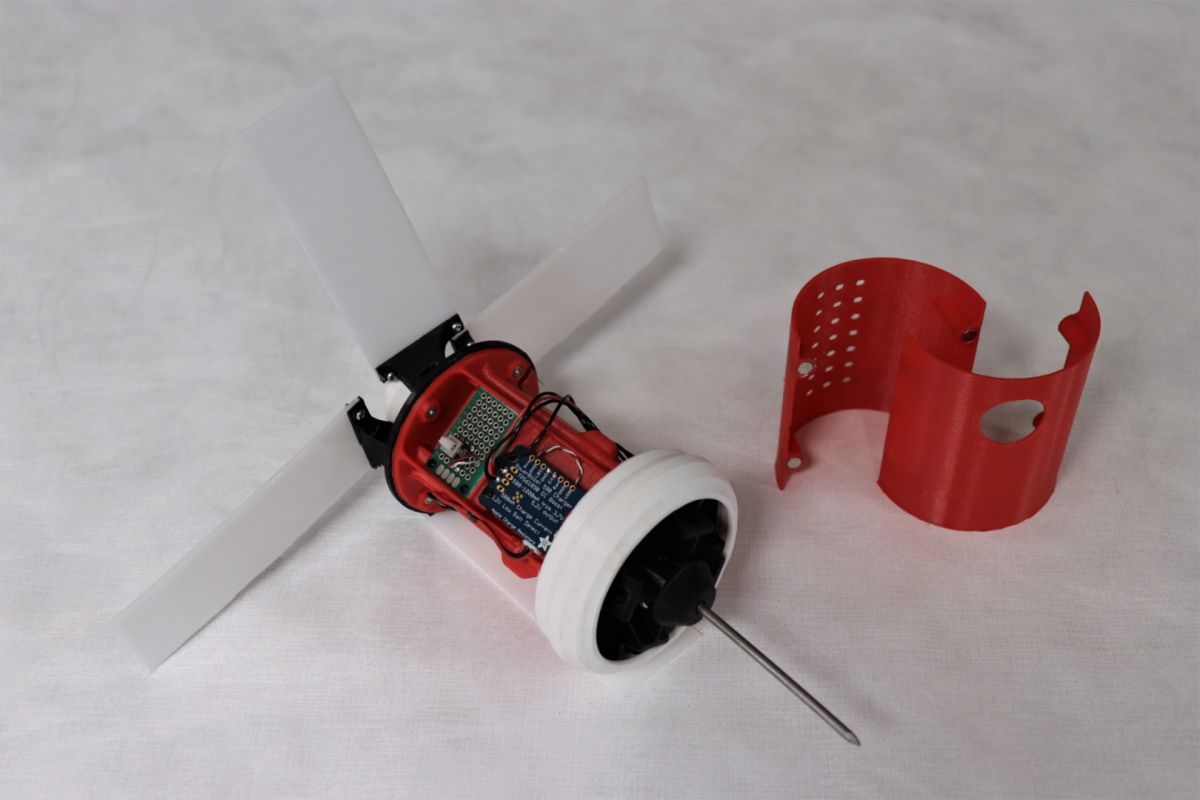
EarthPod
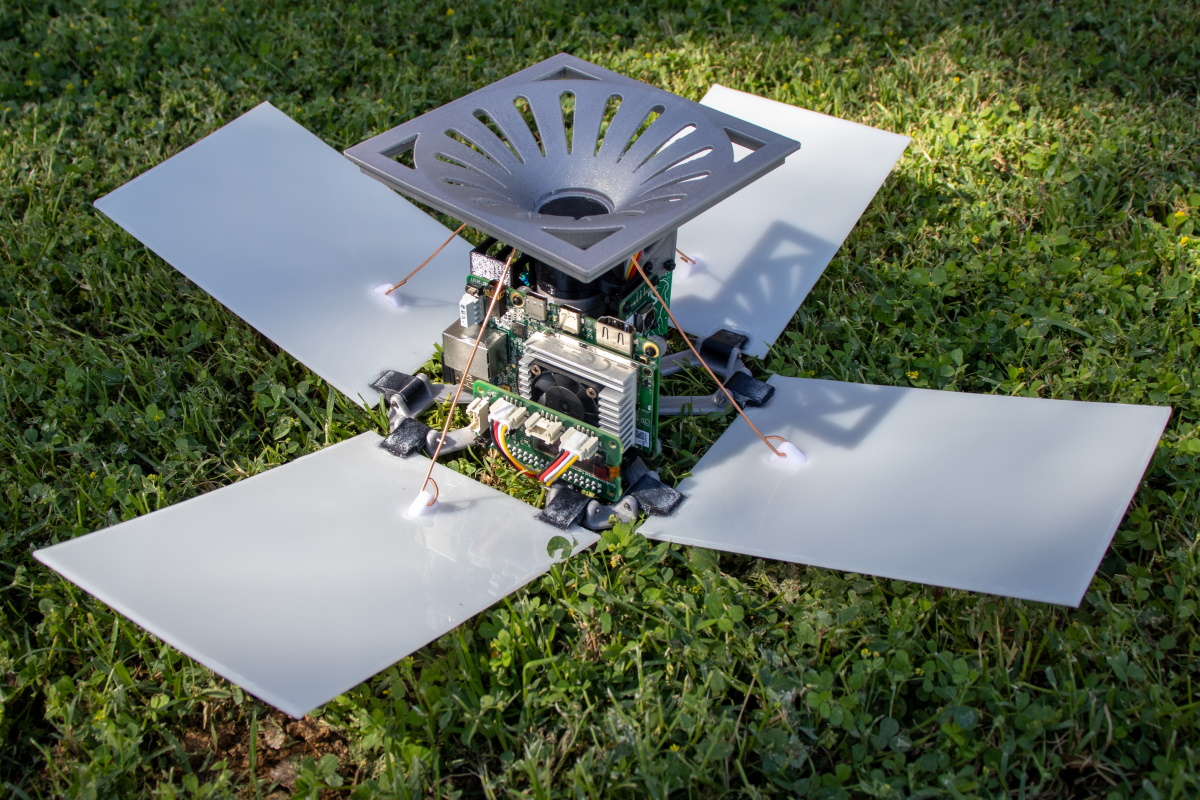
This project is investigating the design of sensor pods to support rapidly deploying environmental sensors using small unmanned aerial vehicles. Currently, two pod designs are in development: The EarthPod, which has a larger sensor capacity and support for folding solar panels, and the EarthPod Mini, which can be dropped from the air and uses autorotation to slow its descent. Methods of releasing and retrieving these pods are also in development, including systems based on electropermanent magnets and twist-release magnets.
I am leading the design of the pods and release systems for this project.
uDrone
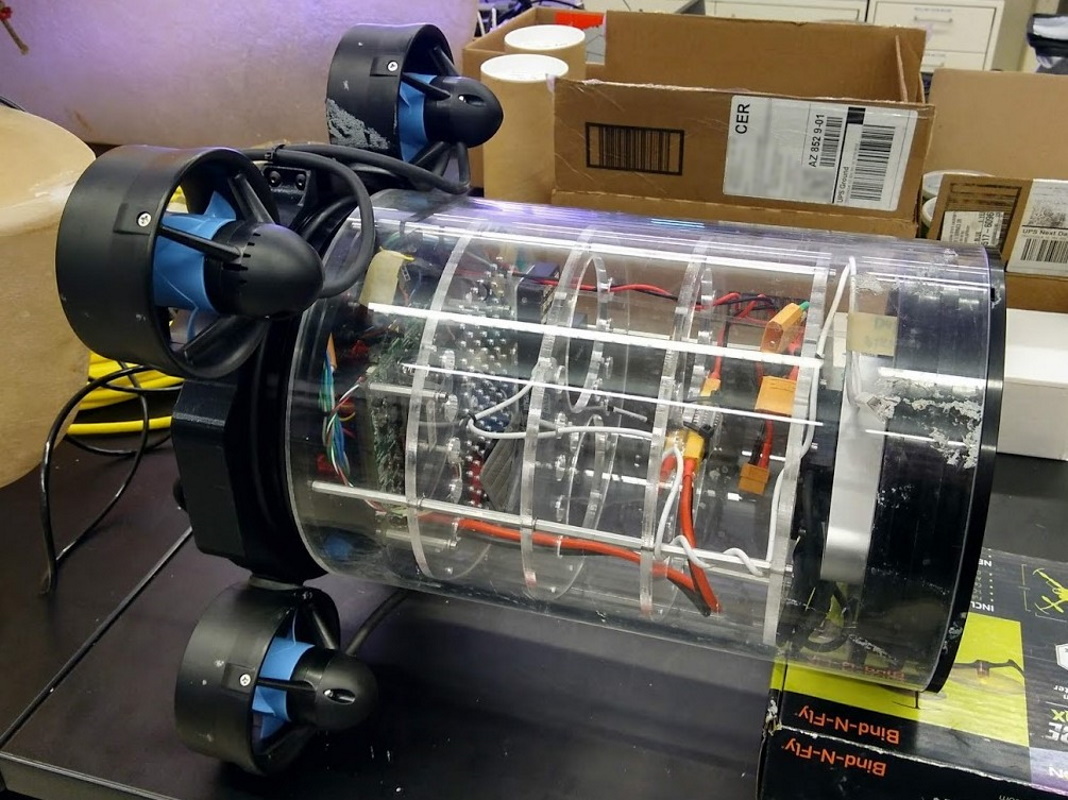
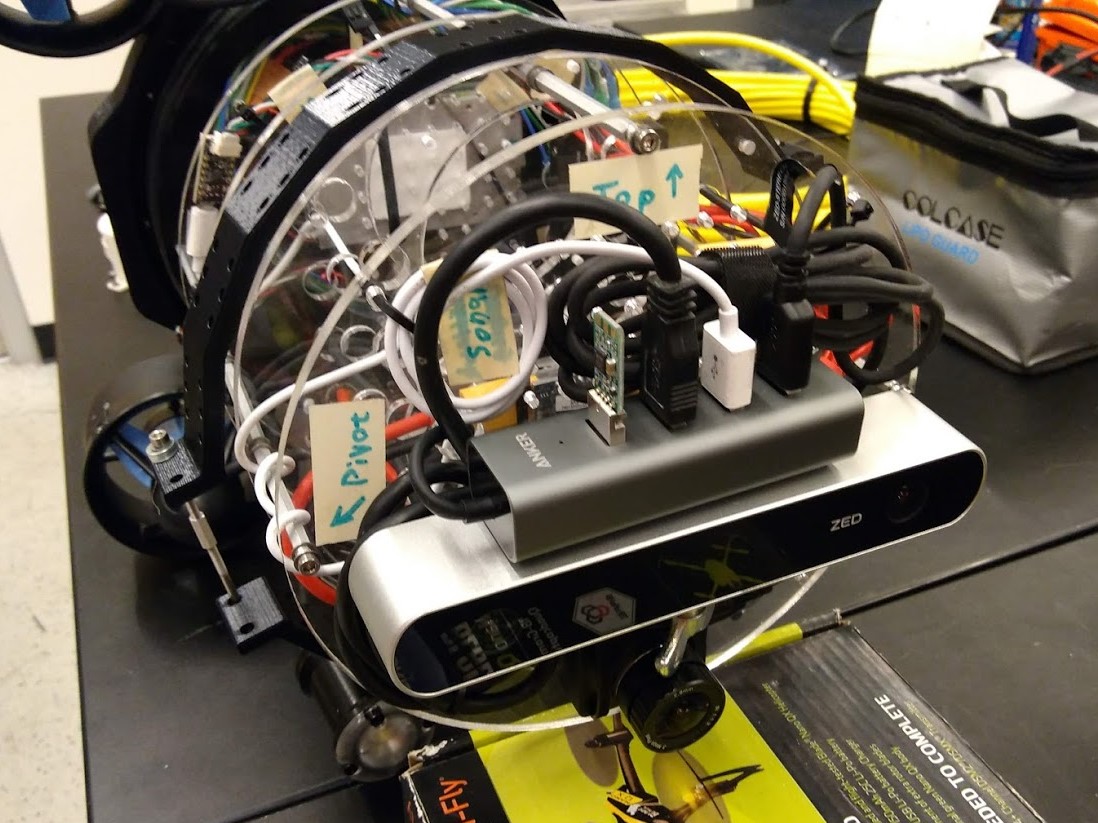
This project is creating an autonomous underwater robot based on a drone flight stack. Its primary goals are inspection and mapping of coral reefs.
I assisted with the design and fabrication of the internal structure and sensor mounting hardware.